图Graph
图的基本定义
图是一种用于存储邻接关系(Adjacency) 的抽象数据类型 (ADT),由顶点和边组成:
- 顶点集合 $V={v_{1},v_{2},…,v_{n}}$
- 连接顶点的边集合 $E$
图又被分为无向图和有向图;
度(Degree)
一个顶点的度为与该顶点相邻的顶点数量(区分有向和无向) 。
无向图(Undirected)
无向图的边为无序对 ${v_{i},v_{j}}$,表示 $v_{i}$ 与 $v_{j}$ 互为邻接。 需要注意:无向图的边不包括自反,即 ${v_{1},v_{1}}$ 不是边。
通过排列组合可以知道:无向图的最大边数为: \(\|E\|\le\binom{\|V\|}{2}=\frac{\|V\|(\|V\|-1)}{2}=O(\|V\|^{2})\)
无向图的度
就是和其邻接的顶点数,
路径(Path)
路径是具有方向的。 通常定义为,顶点的有序序列 $(v_{0},v_{1},v_{2},…,v_{k})$,其中每对相邻顶点 ${v_{j-1},v_{j}}$ 都是图中的边。 方向体现为这是一条“从 $v_{0}$ 到 $v_{k}$ 的路径”。
如果路径经过的点各不相同(不重复),那么就是一条简单路径(Simple Path); 如果简单路径的起点和终点相同,那么就是一个简单环(Simple Cycle); 但是这些定义可能在不同材料中有不同定义方式。
连通性(Connectedness)
如果两点间存在路径,则称这两点是连通的; 如果图中任意两点间都存在路径,则该图是连通图(Connected Graph)。
特殊类型的图结构(基于路径而来)
- 加权图 (Weighted Graphs):
- 每条边关联一个权重(如距离、成本等)
- 路径长度是路径上所有边的权重之和
- 最短路径问题:寻找两点间权重和最小的路径
- 树:
- 连通且任意两点间有且仅有一条路径的图
- 树是无环的(Acyclic)
- 边数 $|E|=|V|-1$
- 增加一条边或者删除一条边都会导致图不连通,也就不是树了
- 可以选定一个顶点为根,递归定义邻居为子节点来形成有根树
- 森林(Forests)
- 无环图就是森林,可以是多棵树;
- $|E|<|V|$ ,树的数量为 $|V|-|E|$ ;
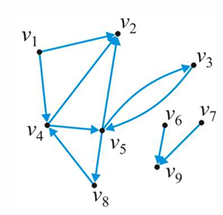
有向图(Directed Graph)
有向图的边是有方向的有序对 $(v_{j},v_{k})$,表示从 $v_{j}$ 到 $v_{k}$ 。 最大边数:\(|E|\le|V|(\|V\|-1)=O(\|V\|^{2})\) 是无向图的两倍,两点之间可以来去两条。
有向图的度
因为具有方向,所以分为:
- 出度 (Out-degree):从该顶点出发的边数 (指向别人);
- 入度 (In-degree):指向该顶点的边数 ,(被指向);
源与汇 (Sources and Sinks)
- 源 (Source):入度为 0 的顶点 。
- 汇 (Sink):出度为 0 的顶点 。 可以用水源和汇流处来理解。
连通性
当 $v_j$ 指向 $v_k$ , $v_j,v_k$ 才是连通的(注意方向)
有向图分为:
- 强连通 (Strongly connected):任意两点间都存在有向路径 。
- 弱连通 (Weakly connected):忽略方向后,任意两点间存在路径 。
有向无环图 (DAG):
无环的有向图,常用于表示偏序关系、编译器解析树、类继承依赖等 。
以上内容均在离散数学中有更加详细的证明和解释,故不赘述。
图的表示和实现
表示邻接关系有三种方法:
- 二元关系列表 (Binary-relation list)
- 邻接矩阵 (Adjacency Matrix)
- 邻接表 (Adjacency List)
关于邻接关系的具体实现我们主要来看后两种:临界矩阵和邻接表。
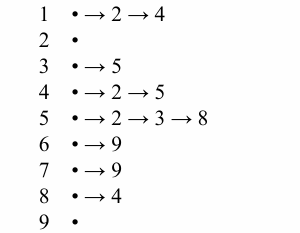
二元关系列表 (Binary-relation list)
这是效率最低的一种存储方式,主要想法是存储图的全部边。 需要 $\Theta(|E|)$ 的内存空间,判断邻接需要 $O(|E|)$ 的时间,找到他的全部邻居需要 $\Theta(|E|)$ 的时间。
邻接矩阵 (Adjacency Matrix)
邻接矩阵存储需要消耗相比于上面更多的空间 $\Theta(|V|^{2})$ ,但是可以获得更快的速度; 判断邻接只需要 $O(1)$ 的时间,查找所有邻居需要 $\Theta(|V|)$ 。
具体想法是:使用一个 $N\times N$ 的矩阵(N是顶点数)来存储两点是否邻接(0或1),如果有权重则为对应边的权重。 对于无向图来说,邻接矩阵一定是对称的($a_{ij}=a_{ji}$),但是有向图则不一定。
邻接矩阵的二维数组表示
邻接矩阵可以用一个二维数组表示,但是 C++ 中并没有给出其表示,因此我们需要自己构建一个二维数组。
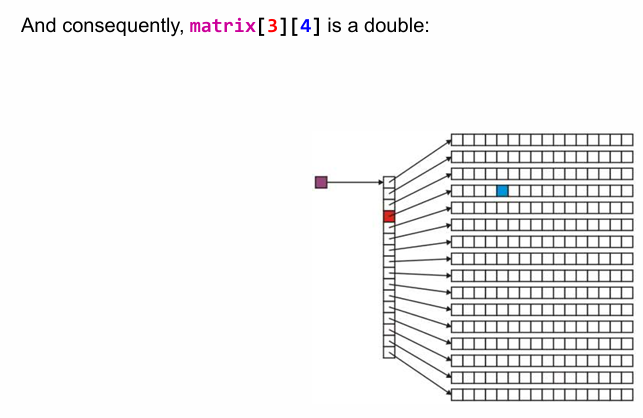
假设需要构建一个 $16\times 16$ 的矩阵,那么可以将其分解为16个 含有16个元素的数组。
含16个元素的数组 arr:double* arr[16];
arr 的数据类型是 double * ,也就是一个双精度浮点数类型的指针(用于存储数组第一个元素的地址);所以我们还需要还需要存储16个指向 double * 这个指针的指针。即:
1
2
double** matrix;
matrix = new double* [16];
注意: 在初始化二维数组时,必须要先给出第二个值,也就是列。因为这样编译器才知道每个数组要先分配多少空间。至于多少个数组就是后面的事。
如果现在需要找到 matrix[3][4] :matrix 指向首个数组指针,3为索引为3数组的指针,4为第四个数组指针的索引为5元素。
但通常我们采用的不是这种静态申请的方式,而是动态管理内存。因此 new 完后需要 delete 两类指针:
- 上图右边含有16个元素的这个数组的数组指针;
- 左边16个指向数值指针的指针;
一些默认值的设定
对于表示权重的邻接矩阵,两个没有连通的顶点更加直观的默认表示是将 matrix[i][j] 设置为 $\infty$ ,表示断开的两个点距离为 $\infty$ 。
1
2
3
4
5
6
for (int i = 0; i < N; ++i) { // 初始化
for (int j = 0; j < N; ++j) {
matrix[i][j] = INF;
}
matrix[i][i] = 0; // 每个顶点和自己的距离都是0,无边
}
而对于非权重邻接矩阵,就可以使用布尔值来表示。
1
2
3
4
5
6
for (int i = 0; i < N; ++i) { // 初始化
for (int j = 0; j < N; ++j) {
matrix[i][j] = false;
}
matrix[i][i] = true;
}
这里设置了 matrix[i][i] = true ,意思是顶点自己和自己始终是连通的,但是并不和自己邻接(有没有边)。
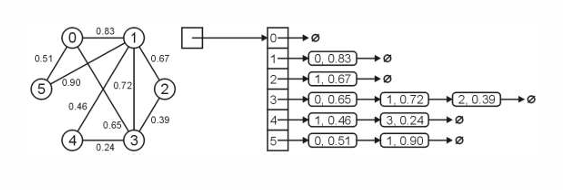
邻接链表 (Adjacency List)
邻接链表存储是三个方式中最高效的。 通过类似于链表的方式来存储每个顶点的邻居。(见下图)
对于邻接表:
- 存储需要 $\Theta(|V|+|E|)$ 的空间;
- 判断一个顶点的邻居需要 $O(\frac{|E|}{|V|})$ 的时间;
- 找到一个节点的全部邻居需要 $\Theta(\frac{|E|}{|V|})$ 的时间;
$\Theta(\frac{|E|}{|V|})$ 指的是平均每一个顶点后,用于表示其邻居的链表长度。
在上面邻接矩阵的实现中,其实能发现使用矩阵来存储邻接关系是很浪费空间的,大约只有5%的位置是被非默认值(非0、$\infty$)占据。所以我们说这个矩阵是很稀疏的(Sparse)。
邻接表则是一种更加高效的实现方式。
一种设计数据类型的方法是:
1
2
3
4
5
6
7
8
9
10
11
class SingleNode {
private:
int adjacent_vertex;
double edge_weight;
SingleNode* next_node;
public:
SingleNode(int, double, SingleNode* = 0);
double weight() const;
int vertex() const;
SingleNode* next() const;
};
存储了该顶点邻居的标识符(顶点编号),边的权重和指向下个顶点的指针; 但是更好的实现方法是将边和邻居的编号成对(边-点)存储:
1
2
3
4
5
6
7
8
9
class Pair {
private:
double edge_weight;
int adjacent_vertex;
public:
Pair(int, double);
double weight() const;
int vertex() const;
};
然后再创建一个链表数组来存储对应顶点信息。
1
2
SingleList<Pair>* array;
array = new SingleList<Pair> [16];
需要注意,在无向图中,为了减少冗余(同一条边被两个顶点储存),需要设计为只存储在索引较大的顶点的链表(或者更小的)。
1
2
3
4
5
6
7
void insert( int i, int j, double w ) {
if ( i < j ) {
array[j].push_front( Pair(i, w) );
} else {
array[i].push_front( Pair(j, w) );
}
}
如图是一个无向有权重图的邻接链表:
在图的表示和实现中,很多情况都不同。这取决于图的属性:
- 有向?无向?
- 有无权重?
- 稀疏还是稠密?
图的搜索遍历
广度优先遍历(Breadth First Traversal)
图的广度优先遍历也可以通过队列的方式实现:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
void Graph::breadth_first_traversal(Vertex *first) const {
// 使用哈希表来记录已访问的顶点,防止重复访问和死循环
// 这里的 hash 充当 visited 数组的功能
unordered_map<Vertex *, int> hash;
hash.insert(first); // 标记起始顶点为已访问
std::queue<Vertex *> queue;
queue.push(first); // 将起始顶点入队,起始顶点可以随机选取
while (!queue.empty()) {
Vertex *v = queue.front();
queue.pop();
// Perform an operation on v
// 遍历 v 的所有邻接顶点
for (Vertex *w : v->adjacent_vertices()) {
// 如果邻接顶点 w 未被访问过
if (!hash.member(w)) {
hash.insert(w); // 标记 w 为已访问
queue.push(w); // 将 w 入队,等待后续访问
}
}
}
}
具体流程:(和在树中的实现极为相像,只是现在只对未被访问节点的进行遍历) 如果队列非空,
- 选择一个节点作为初始节点并push进队列;
- 对于当前节点的邻居,如果未被访问过,标记为已访问并push进队列;
深度优先搜索(Depth First Traversal)
深度优先搜索可以使用栈来实现: 递归实现:(这里使用的栈其实是系统递归时的函数调用栈 Call Stack)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
// 主函数入口
void Graph::depth_first_traversal(Vertex *first) const {
// 创建哈希表记录访问状态
std::unordered_map<Vertex *, int> hash;
hash.insert(first); // 标记起始点
// 调用顶点自身的递归函数
first->depth_first_traversal(hash);
}
// 顶点自身的递归函数
void Vertex::depth_first_traversal(unordered_map<Vertex *, int> &hash) const {
// Perform an operation on this
// 遍历当前顶点的所有邻接顶点
for (Vertex *v : adjacent_vertices()) {
// 如果邻接点 v 未被访问
if (!hash.member(v)) {
hash.insert(v); // 标记为已访问
// 递归调用,深入下一层
v->depth_first_traversal(hash);
}
}
}
使用显式的栈来实现:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
void Graph::depth_first_traversal(Vertex *first) const {
// 记录已访问顶点的哈希表
unordered_map<Vertex *, int> hash;
hash.insert(first);
// 使用标准库栈 (stack)
std::stack<Vertex *> stack;
stack.push(first); // 压入起始顶点
while (!stack.empty()) {
// 获取并弹出栈顶元素
Vertex *v = stack.top();
stack.pop();
// Perform an operation on v (print)
// 遍历 v 的所有邻接顶点
for (Vertex *w : v->adjacent_vertices()) {
// 如果邻接点 w 未被访问
if (!hash.member(w)) {
hash.insert(w); // 标记为已访问
stack.push(w); // 将 w 压入栈中,下次循环将优先访问它(后进先出)
}
}
}
}
具体流程在 P83-108
通过广度、深度优先遍历可以检查一个图中的顶点是否连通?(遍历完后还有没有未被访问的节点)